


A nova bola oficial da Copa do Mundo FIFA 2026, chamada TRIONDA, não mudou apenas no desenho e na construção externa. Por dentro, ela utiliza eletrônica embarcada capaz de registrar movimentos da bola centenas de vezes por segundo e enviar essas informações para a infraestrutura de arbitragem.
O sistema ajuda a identificar o instante exato de um chute, desvio ou toque, informação importante para impedimentos semiautomáticos e outras análises realizadas pelo VAR.
Mas o ponto mais interessante não é simplesmente existir um sensor dentro da bola. O diferencial está na combinação entre IMU, comunicação UWB, antenas ao redor do campo, câmeras e processamento de dados em baixa latência.

Bola Trionda oficial copa do mundo 2026
O que mudou na bola da Copa 2026?
A tecnologia de bola conectada não começou agora. A Al Rihla, utilizada na Copa de 2022, já possuía uma IMU de 500Hz instalada no centro da bola por meio de uma estrutura interna de suspensão.
Na TRIONDA, a integração foi redesenhada. O sensor deixou de ficar suspenso no centro e passou a ser instalado lateralmente em uma camada interna de um dos quatro painéis da bola. Para compensar essa massa fora do centro, os outros três painéis recebem contrapesos.
Esse balanceamento é indispensável. Colocar uma bateria, antena e circuito eletrônico em apenas um lado poderia alterar o giro, o quique e a trajetória da bola. Portanto, a inovação não está somente no sensor: ela também envolve materiais, distribuição de massa e construção mecânica.
A estrutura externa utiliza quatro painéis, com costuras profundas e texturas desenvolvidas para melhorar a estabilidade durante o voo e a aderência em diferentes condições de jogo.
Por que colocar eletrônica dentro da bola?
A principal função da eletrônica é informar quando e como a bola foi tocada.
Em uma imagem de vídeo, mesmo com várias câmeras, pode ser difícil definir o quadro exato em que o pé encostou na bola. Já uma IMU instalada dentro dela percebe imediatamente a aceleração e a rotação provocadas pelo contato.
Esses dados podem ajudar em situações como:
- definição do instante do passe em um impedimento;
- identificação de desvios quase imperceptíveis;
- possíveis toques de mão;
- determinação do último jogador a tocar na bola;
- lances com dois contatos muito próximos;
- análise de impacto, giro e mudança de trajetória.
A bola não decide se houve impedimento, falta ou toque de mão. Ela fornece uma linha do tempo de alta resolução, que pode ser comparada com os dados das câmeras e com a posição dos jogadores.
Qual tipo de sensor é utilizado?
A bola utiliza uma IMU, sigla para Unidade de Medição Inercial.
Uma IMU normalmente reúne dois sensores principais:
- acelerômetro de três eixos;
- giroscópio de três eixos.
O acelerômetro mede aceleração nos eixos X, Y e Z. Dentro da bola, ele pode registrar impactos, chutes, quicadas, mudanças de velocidade e alterações de direção.
O giroscópio mede velocidade angular, indicando como a bola gira em torno de cada eixo.
Ao analisar as duas medições em conjunto, o sistema consegue observar muito mais do que apenas um pico de impacto. Ele pode avaliar o início do evento, sua intensidade, duração, direção e a rotação produzida depois do contato.
O modelo exato da IMU utilizada na TRIONDA não foi divulgado publicamente. Portanto, não é correto afirmar que seja um MPU6050 ou outro componente comercial específico.
Onde entra o UWB?
A IMU é excelente para perceber movimento, mas possui uma limitação importante: sozinha, ela não sabe com precisão onde a bola está no campo.
É aí que entra o UWB, sigla para Ultra-Wideband ou banda ultralarga.
O UWB é uma tecnologia de rádio capaz de transmitir dados e realizar medições precisas de posição em uma área com infraestrutura própria. Antenas, também chamadas de âncoras ou receptores, são instaladas em pontos conhecidos ao redor do campo. O sensor na bola comunica-se com essa rede, permitindo calcular sua posição e acompanhar seu deslocamento.
De forma simplificada:
- IMU: identifica aceleração, impacto e rotação;
- UWB: ajuda a localizar a bola no espaço;
- Câmeras: acompanham jogadores e elementos visuais;
- Software: sincroniza e interpreta todas as informações.
O UWB funciona como uma espécie de GPS local. Em vez de utilizar satélites, o sistema cria uma referência de localização com antenas instaladas ao redor da área monitorada.

Sistema triangulação UWB – GPS Local na copa do mundo
UWB não é apenas uma forma de transmitir os dados
No sistema xBall da Kinexon, o sensor instalado na bola se comunica com uma infraestrutura UWB montada ao redor do campo. Segundo a empresa, o sistema consegue capturar dados de posição, velocidade, giro e instante dos toques em até 500Hz.
Isso significa que o UWB não aparece apenas como um “rádio para mandar os dados da IMU”. Ele também faz parte do sistema de posicionamento.
As antenas recebem os sinais da bola, o sistema calcula sua localização e o processador transforma as medições em informações utilizáveis. A plataforma UWB da Kinexon é projetada para trabalhar em tempo real, com latência inferior a 100ms em suas soluções de localização esportiva.
Assim, o sistema pode produzir duas informações complementares:
- A IMU detecta que algo aconteceu com a bola.
- O UWB ajuda a informar onde isso aconteceu.
Quando os dados possuem relógios sincronizados (RTC/NTP), o sistema pode associar o pico detectado pela IMU à posição da bola, às imagens das câmeras e à posição dos jogadores naquele mesmo instante.
Por que os 500Hz são tão importantes?
Uma frequência de 500Hz significa que o sistema registra uma nova amostra a cada 2 milissegundos.
Isso é importante porque o contato entre o jogador e a bola pode durar muito pouco. Um sistema com baixa frequência pode registrar poucas informações durante esse intervalo ou até deixar o evento entre duas amostras.
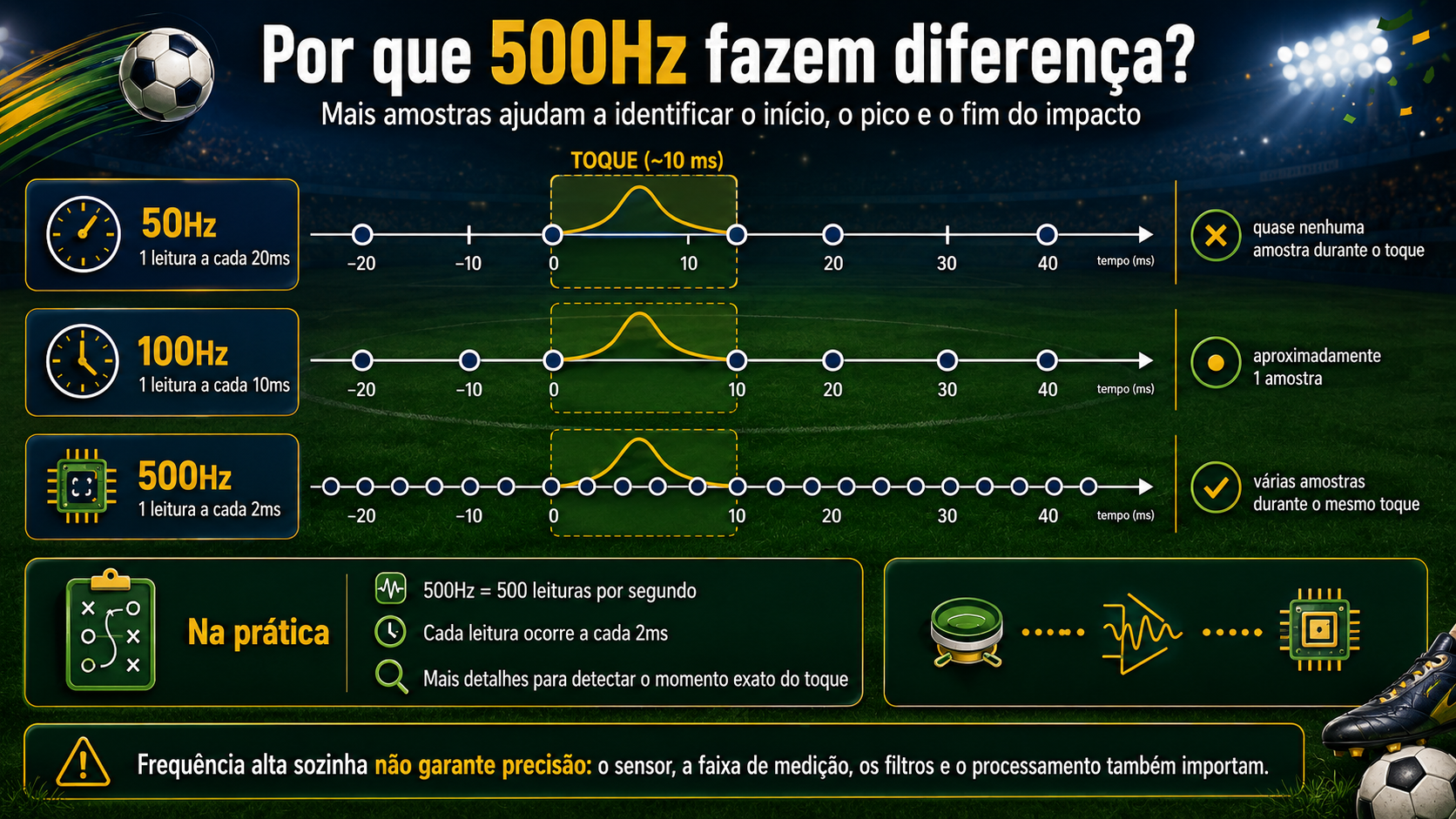
Importância captura de dados na bola da copa Trionda
Nesse exemplo, um sensor de 500Hz poderia registrar aproximadamente cinco pontos durante o contato. Isso permite observar melhor o início, o pico e o fim do impacto.
A comparação com as câmeras também ajuda a entender a diferença. Uma câmera operando a 50 quadros por segundo produz um novo quadro a cada 20ms. Já a IMU de 500Hz produz dez medições no mesmo intervalo.
Isso não substitui a imagem. O sensor e a câmera enxergam coisas diferentes e, juntos, formam uma análise mais completa.
O sistema envia 500 medições completas de tudo?
É importante separar três conceitos:
- frequência interna do sensor;
- frequência de transmissão;
- frequência final dos dados processados.
Uma IMU pode realizar medições internamente em uma determinada frequência, enquanto o microcontrolador organiza essas leituras em buffers e pacotes. A comunicação pode transmitir cada amostra individualmente ou enviar grupos de dados.
Depois disso, o servidor ainda precisa:
- sincronizar os pacotes;
- corrigir possíveis atrasos;
- filtrar ruídos;
- combinar IMU e UWB;
- identificar eventos;
- relacionar os dados às câmeras;
- entregar a informação ao sistema de arbitragem.
Portanto, “500Hz” é uma parte importante, mas não descreve sozinho toda a velocidade ou a precisão do sistema.
Um MPU6050 também pode trabalhar em 500Hz?
Em termos de taxa de amostragem, sim.
O MPU6050 possui acelerômetro e giroscópio de três eixos, filtros digitais, FIFO e taxas internas suficientes para gerar dados nessa faixa. Com a configuração correta, é possível desenvolver uma aplicação que leia o sensor próximo de 500Hz.
Porém, configurar o registrador para 500Hz não garante que o projeto esteja realmente coletando 500 amostras úteis por segundo.
O resultado também depende de:
- velocidade e uso correto do I2C;
- biblioteca utilizada;
- leitura por interrupção;
- uso do FIFO;
- tempo de processamento;
- quantidade de dados enviada pela serial;
- gravação em cartão;
- comunicação sem fio;
- estabilidade do relógio;
- ausência de funções bloqueantes no código.
Um programa pode configurar o sensor para 500Hz e, ao mesmo tempo, perder amostras porque imprime textos demais no Monitor Serial ou realiza outras tarefas lentamente.
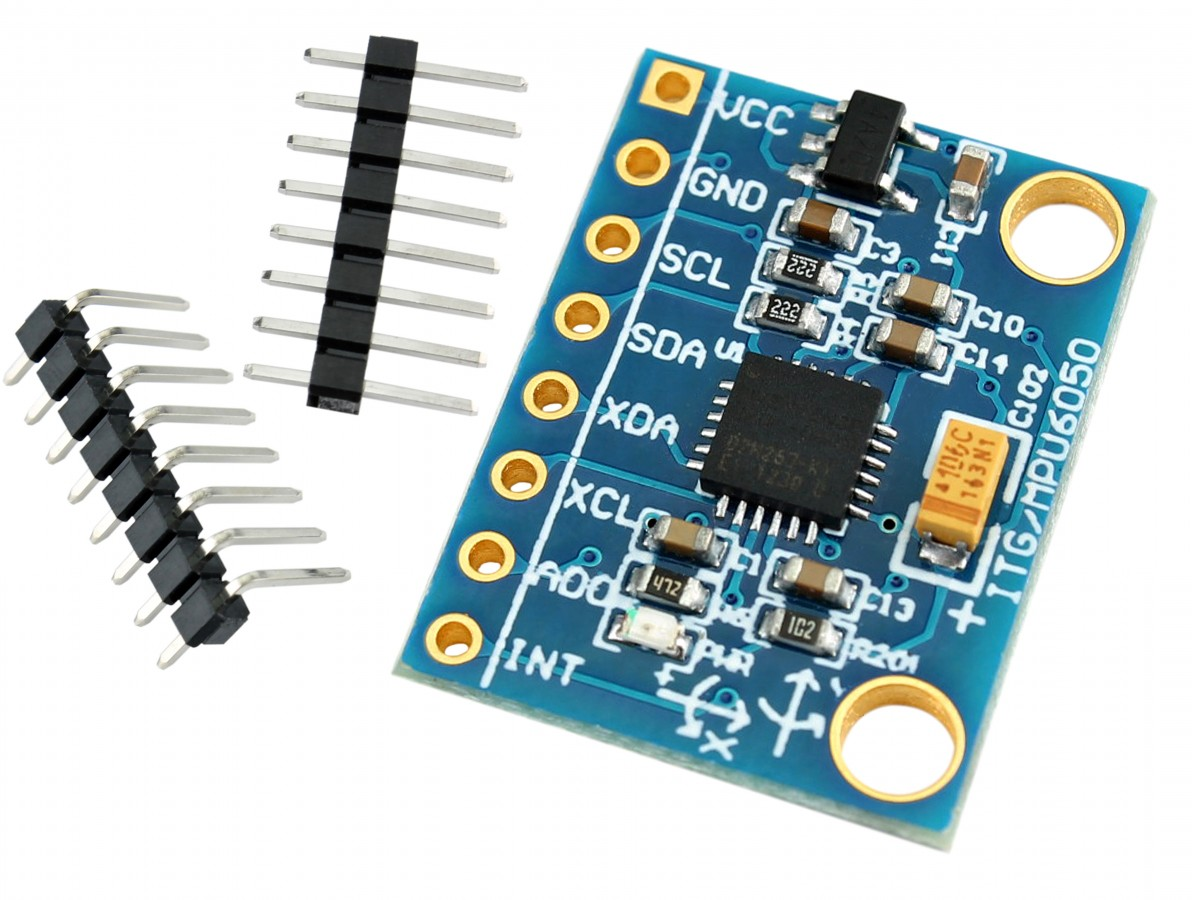
Sensor IMU modelo MPU6050
Por que um MPU6050 não se iguala automaticamente ao sistema profissional?
O MPU6050 não é um sensor ruim. Ele continua sendo muito útil para aprendizado, robótica, estabilização e análise de movimento.
A diferença é que o sistema da bola não depende apenas da frequência da IMU.
Ele precisa reunir:
- faixa de medição adequada aos impactos;
- baixo ruído;
- calibração;
- estabilidade térmica;
- relógios sincronizados;
- leitura sem perda de amostras;
- comunicação de baixa latência;
- localização por UWB;
- algoritmos de detecção;
- integração com câmeras;
- encapsulamento resistente;
- bateria e carregamento;
- balanceamento da bola;
- validação em condições reais.
O acelerômetro do MPU6050 chega a uma faixa configurável de ±16g. Em um impacto mais intenso, o sinal pode atingir esse limite e saturar. Quando isso acontece, o sensor deixa de mostrar a aceleração real acima da sua escala.
Além disso, sensores diferentes podem apresentar níveis distintos de ruído, deriva, estabilidade e resposta dinâmica. Duas IMUs operando em 500Hz não necessariamente entregam dados com a mesma qualidade.
Mais dados não significam automaticamente mais precisão
Coletar 500 amostras por segundo gera uma grande quantidade de informações, mas os dados brutos ainda precisam ser interpretados.
Um acelerômetro parado não mostra exatamente zero. Ele apresenta offset, ruído eletrônico, vibração e influência da gravidade. O giroscópio também possui deriva e pequenas variações.
Para reconhecer um chute, o sistema pode analisar:
- aumento repentino da aceleração;
- pico do impacto;
- duração do evento;
- mudança na velocidade angular;
- direção do movimento;
- comportamento posterior da bola;
- posição fornecida pelo UWB;
- correspondência com as câmeras.
Um filtro muito forte pode deixar o gráfico bonito, mas apagar parte de um impacto curto. Um filtro muito aberto preserva eventos rápidos, mas também deixa passar mais ruído.
Por isso, a precisão não vem apenas do sensor. Ela surge da combinação entre hardware, configuração e processamento.
O processamento é o verdadeiro diferencial
Imagine que a IMU detecte um pico elevado. Sozinho, esse pico não informa necessariamente se ocorreu um chute, uma quicada, uma cabeçada ou uma colisão com a trave.
Agora imagine que, no mesmo instante:
- a IMU registra impacto e mudança de giro;
- o UWB mostra uma alteração súbita de velocidade e trajetória;
- as câmeras detectam o pé de um jogador próximo à bola;
- o sistema conhece a posição de todos os jogadores;
- os relógios das fontes estão sincronizados.
Ao cruzar essas informações, o sistema ganha contexto.
É isso que torna o conjunto profissional tão poderoso. A precisão não depende de uma leitura isolada, mas da concordância entre várias fontes de dados.
Como a eletrônica da bola é alimentada?
O conjunto eletrônico da bola utiliza uma bateria interna recarregável. Como não seria interessante criar uma porta USB, tampa ou conector externo na superfície, o carregamento é feito sem fio, por indução.
Nesse sistema, a bola é colocada sobre uma base de carregamento e a energia é transferida por um campo magnético entre uma bobina na base e outra integrada ao conjunto eletrônico da bola. É o mesmo princípio utilizado em carregadores sem fio de celulares e em outros dispositivos selados.
A ausência de conectores externos ajuda a manter a estrutura fechada, protegida contra umidade, impactos e deformações. Também evita interferências na aerodinâmica e no acabamento da bola.
A Kinexon informa que o sensor xBall possui carregamento sem fio e autonomia de até aproximadamente cinco horas por carga. Informações divulgadas durante a Copa de 2026 indicam que as bolas conectadas são carregadas antes das partidas e oferecem autonomia suficiente para uma partida completa, incluindo prorrogação.
Esse detalhe mostra mais uma vez que o desafio não está apenas no sensor. O projeto precisa integrar bateria, circuito de carregamento, bobina indutiva, gerenciamento de energia e encapsulamento sem alterar o peso ou o comportamento da bola.
É possível recriar algo parecido?
É possível reproduzir os princípios utilizados pelo sistema:
- detectar impactos com uma IMU;
- trabalhar com alta frequência de amostragem;
- localizar um objeto usando UWB;
- sincronizar movimento e posição;
- interpretar eventos com software.
Entretanto, utilizar um ESP32, uma IMU e um módulo UWB não produz automaticamente o mesmo resultado da bola oficial.
O desafio principal não é apenas escolher os componentes. É garantir que os dados tenham:
- frequência real conhecida;
- timestamp confiável;
- baixa perda de pacotes;
- calibração;
- filtragem adequada;
- sincronização;
- interpretação correta.
Em um projeto bem desenvolvido, a IMU pode indicar o instante e o tipo provável de movimento, enquanto o UWB fornece a posição do objeto dentro de uma área previamente mapeada. A precisão final dependerá principalmente de como essas duas fontes são calibradas, sincronizadas e processadas.

Comparação Projeto Maker vs Sistema profissional bola da copa
Conclusão
A tecnologia da TRIONDA mostra como sensores relativamente conhecidos podem ganhar outra dimensão quando fazem parte de um sistema completo.
A IMU de 500Hz percebe movimentos muito rápidos. O UWB transmite dados e fornece referência de posição. As antenas acompanham a bola dentro do campo. As câmeras observam os jogadores. O software sincroniza tudo e transforma milhares de medições em uma informação útil para a arbitragem.
Um MPU6050 pode operar em uma frequência elevada. Um ESP32 pode processar sensores. Módulos UWB podem localizar objetos em áreas controladas. Mas nenhum desses elementos, isoladamente, entrega a precisão do sistema profissional.
O diferencial está no conjunto: sensor adequado, comunicação rápida, localização, sincronização e processamento de dados bem desenvolvido.
A bola conectada não é apenas uma bola com um chip. Ela é a parte móvel de uma infraestrutura inteira de medição.