

Na área da robótica e rastreamento é de grande importância saber a localização de um determinado veículo ou drone, e para isso, vamos utilizar um sistema de datalogger de percurso, conseguindo determinar sua trajetória real e fazermos determinadas análises e conclusões, por meio do Projeto Arduino GPS 6M.
Baseado nisto, desenvolveremos um sistema de registro de posição, a fim de determinar os locais pelos quais um veículo ou dispositivo se locomoveu ao longo de uma trajetória.
Para isto, utilizaremos um datalogger de percurso para receber as posições de um GPS e gravá-las em um cartão de memória, para posterior análise dos pontos no Google My Maps.
Portanto, através desse projeto, você será capaz de:
- Criar um datalogger de percurso com GPS;
- Utilizar o GPS NEO-6M para monitorar a trajetória percorrida pelo objeto;
- Plotar e analisar os dados de posicionamento no Google My Maps.
Desenvolvimento do Projeto Arduino GPS 6M Datalogger de Percurso
O projeto consiste em gravar as posições de locomoção de um dispositivo ou automóvel de uma localidade para outra. Assim, o sistema possuirá dois botões. Um será utilizado para iniciar a gravação das posições e o segundo, será utilizado para finalizar as gravações. Além disso, teremos um LED para sinalizar o funcionamento e gravação dos dados do GPS em tempo real.
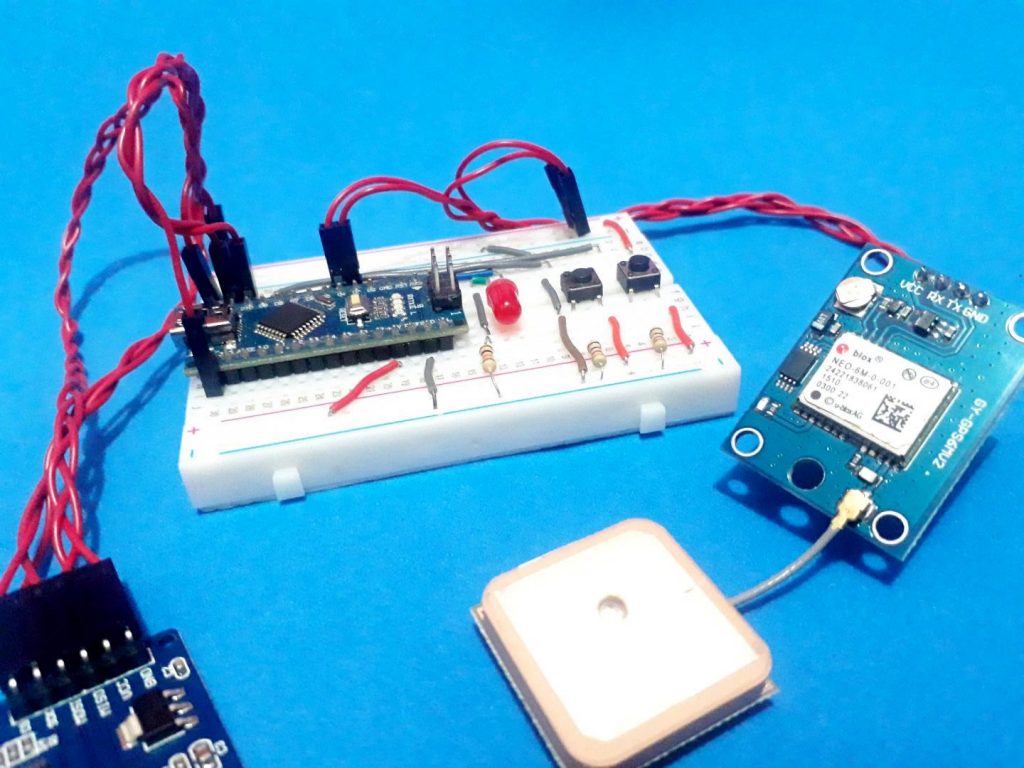
Logo, a partir do princípio de funcionamento apresentado, foi construído o seguinte circuito, que é apresentado na Figura 1.
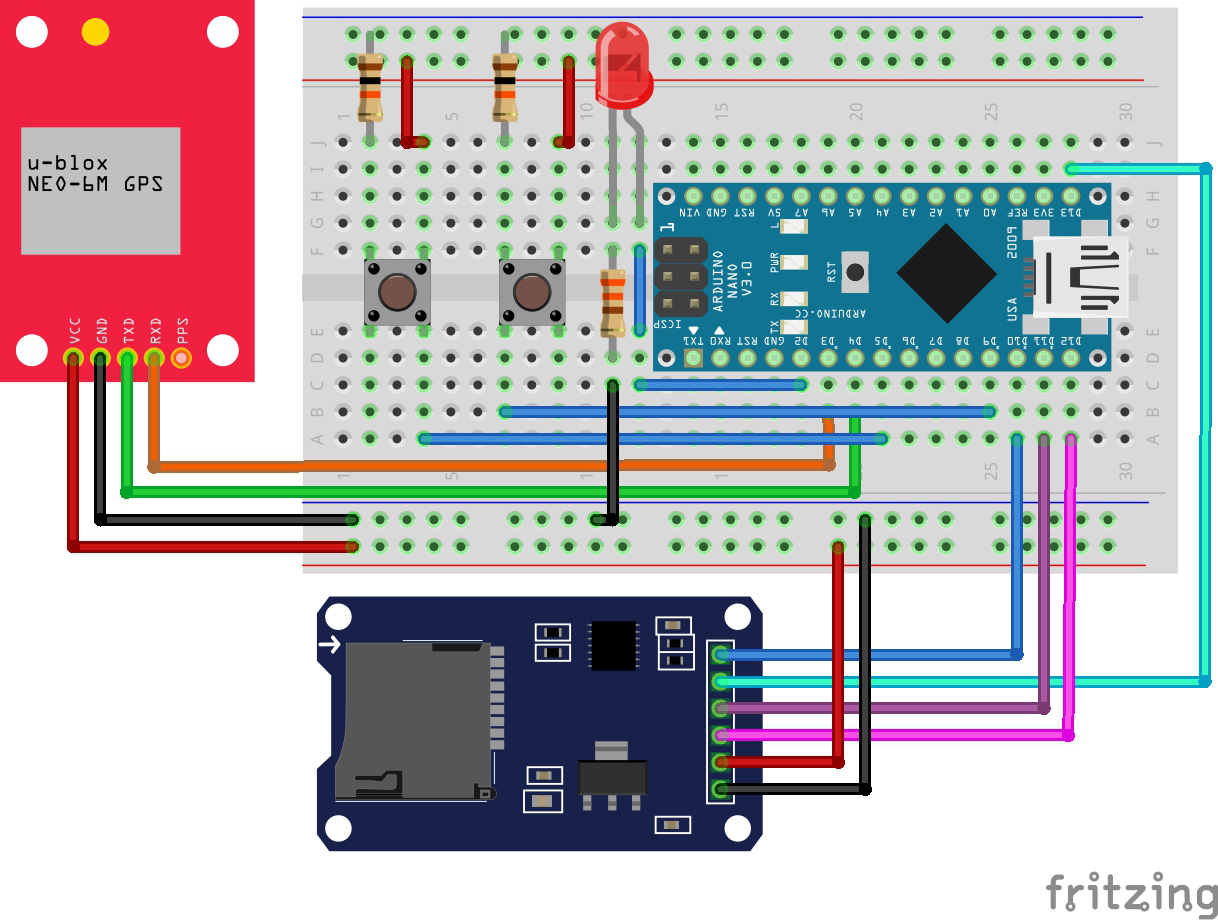
Figura 1 – Circuito do Datalogger com GPS NEO-6M
Para a construção do circuito, utilizamos a lista de componentes eletrônicos a seguir. Todos os ítens podem ser encontrados na Loja UsinaInfo.
Componentes Necessários para o Datalogger de Percurso
- Arduino Nano
- Módulo GPS NEO-6M
- Módulo Leitor de Cartão SD
- Push Buttons 6x6x5 mm
- Resistores de 10kR
- LED Vermelho
- Resistor de 330R
De acordo com os componentes e o circuito, discutiremos a seguir, construção da lógica desenvolvida para armazenar as posições do GPS.
Desenvolvimento da Lógica de Programação
O GPS é um dispositivo que necessita, inicialmente, se conectar aos satélites a fim de determinar sua posição em sua área de atuação.
Inicialmente, realizamos a inclusão de todas as bibliotecas para o Projeto Arduino GPS 6M. Primeiramente, declaramos as bibliotecas SD.h e SPI.h para o módulo leitor de cartão SD. Em seguida, declaramos as bibliotecas SoftwareSerial.h e TinyGPS para o módulo GPS NEO-6M, conforme apresentado a seguir.
[crayon-6a2a3253b124d080845547/]
Utilizou-se a biblioteca Software Serial para criar duas portas de comunicação serial, conforme definidas na linha 6. O 4 e 0 3 representam, respectivamente, os pinos Rx e Tx.
[crayon-6a2a3253b1252437178104/]
Em seguida, foram definidos os objetos GPS e myFile para os módulos. Posteriormente, declaramos as variáveis e definimos nomes para os pinos de conexão dos Botões e LED, conforme apresentado na Figura 2.
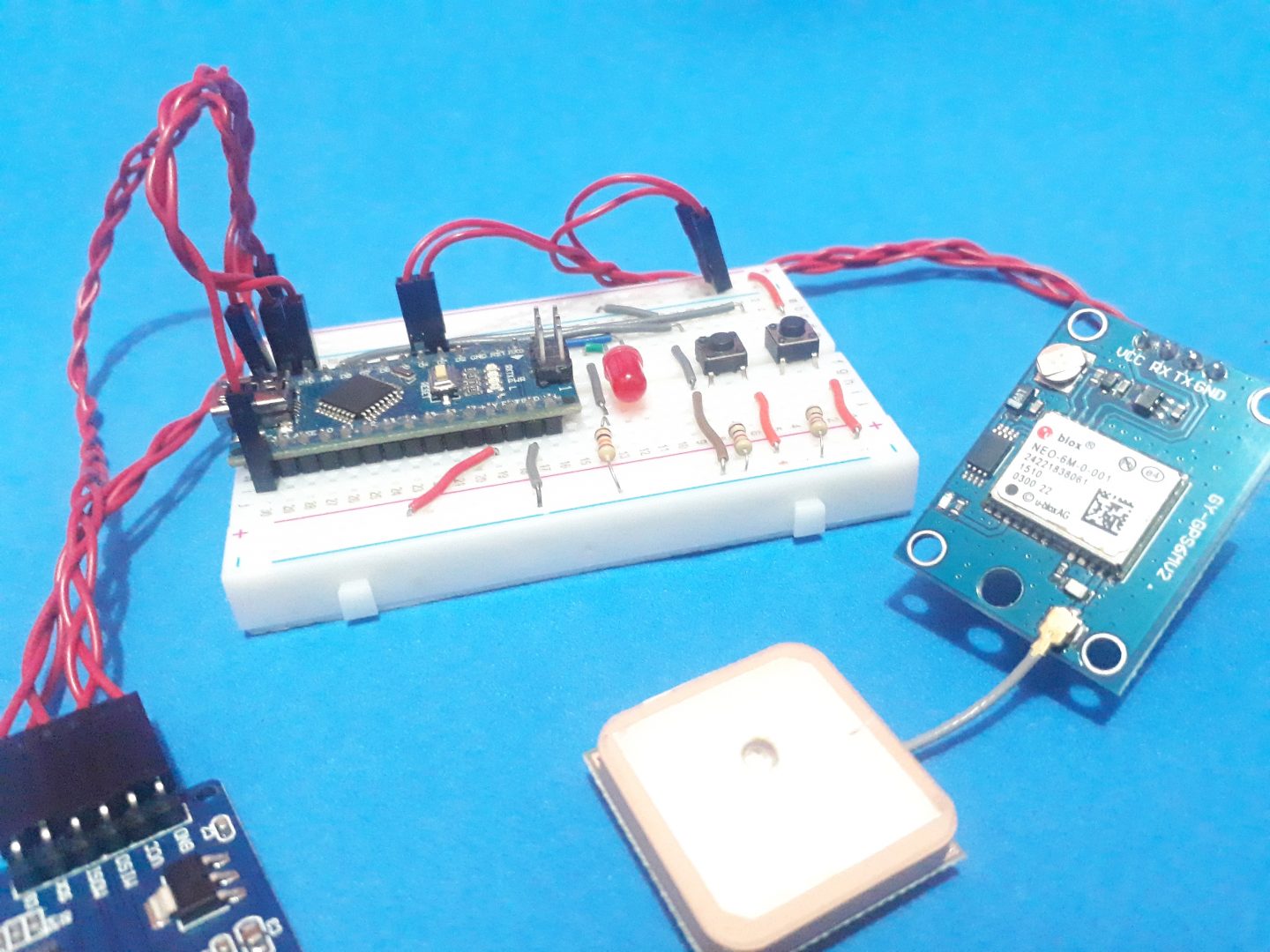
Figura 2 – Circuito do Datalogger de Percurso com Arduino e GPS NEO-6M.
Essas configurações são apresentadas no trecho de código a seguir.
[crayon-6a2a3253b1253726552462/]
Logo após as definições de nomes, o fluxo de execução entrará na função setup e realizará as configurações iniciais.
Configurações de Inicialização dos Módulos na Função Setup
Primeiramente, o GPS 6M e a comunicação serial serão inicializados. Em seguida, será realizada a inicialização de comunicação do SD Card, conforme apresentado a seguir.
Caso ocorra alguma falha de comunicação com o Módulo SD Card, o sistema apresentará uma mensagem de erro no monitor serial.
[crayon-6a2a3253b1254713807446/]
Por fim, na função loop, iniciaremos a apresentação da lógica de funcionamento dos dispositivos e controle completo do sistema.
Execução da Lógica Principal do Datalogger de Percurso
Inicialmente, o sistema irá realizar a leitura dos botões de Início e Término, conforme apresentado no código abaixo.
[crayon-6a2a3253b1255149530171/]
Quando o usuário pressionar o Botão Iniciar, o fluxo de código entrará na condição a seguir e executará as seguintes linhas de código.
[crayon-6a2a3253b1258701174633/]
Primeiramente, será atribuído 1 à variável controle. Essa variável será utilizada para liberar a gravação dos dados no Módulo SD Card. Em seguida, o arquivo GPS.txt será criado e aberto para escrita.
Posteriormente, escrevemos os nomes Latitude e Longitude a fim de formar as duas colunas dos dados de posição do GPS.
Gravação de dados no Cartão de Memória
Agora, de acordo com o código abaixo, o fluxo entrará na condição de gravação dos dados do GPS no módulo.
[crayon-6a2a3253b1259740066423/]
Após o GPS receber os dados, o sistema irá ligar o LED Vermelho, conforme apresentado na Figura 3. O LED irá sinalizar a coleta e gravação de dados no módulo SD Card.
Figura 3 – Sinalização de gravação de dados de posição do objeto.
Posteriormente, é realizada a aquisição das posições de latitude e longitude conforme apresentado no código abaixo.
[crayon-6a2a3253b125a387419571/]
Por fim, de acordo com as linhas de código a seguir, os dados serão escritos no arquivo de texto.
[crayon-6a2a3253b125b914316177/]
Conforme é possível observar, foi realizada uma leitura e gravação a cada 1 segundo.
Finalmente, após chegar ao local desejado, o usuário deverá apertar o botão de término, para finalizar a gravação dos dados no datalogger de percurso. O código é apresentado a seguir.
[crayon-6a2a3253b125c741723343/]
Primeiramente, a variável controle será colocada para 0. Desse modo, o sistema irá parar de gravar dados no cartão de memória. Em seguida, o arquivo será fechado e o LED Vermelho será desligado, a fim de informar que o sistema parou de capturar dados do módulo GPS.
Portanto, após esta ação, necessitamos coletar os dados do cartão de memória e apresentá-los em um mapa, para visualizar o percurso realizado.
Visualização do Percurso do Usuário no Google My Maps
Após a retirada do cartão e abertura do bloco de texto, encontramos diversos dados de posição de latitude e longitude. Para que não apresentassem diversos pontos ao longo do mapa, realizamos a seleção dos principais pontos com o objetivo de nos auxiliar na apresentação do percurso.
Os pontos são apresentados na Figura 4.
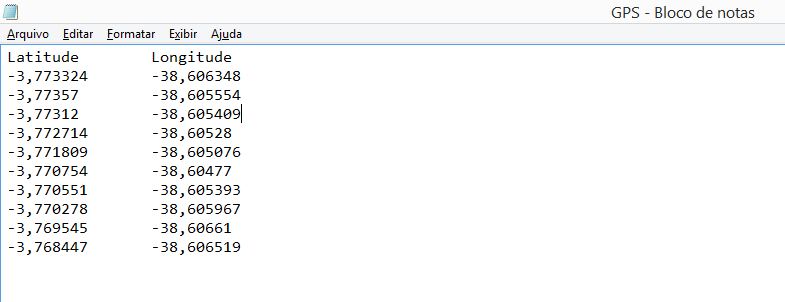
Figura 4 – Pontos de Coordenadas Coletados.
Com os dados em mãos, o usuário deverá colocá-los em colunas no Excel, conforme apresentado na Figura 5.
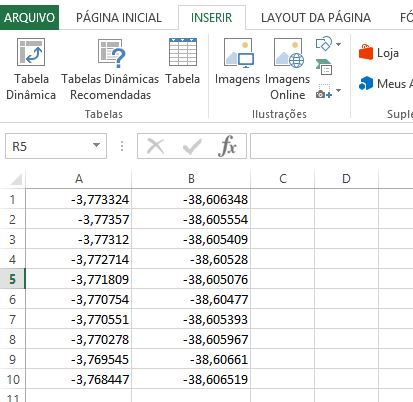
Figura 5 – Coordenadas de Latitude e Longitude no Excel.
Em seguida, salve o arquivo em .csv e importe o arquivo no Google My Maps. Para isto, acesse o site do Google My Maps e realize os seguintes passos.
Criando um Mapa de Pontos do Datalogger de Percurso no Google My Maps
Primeiramente, crie um novo mapa, conforme apresentado na Figura 6.
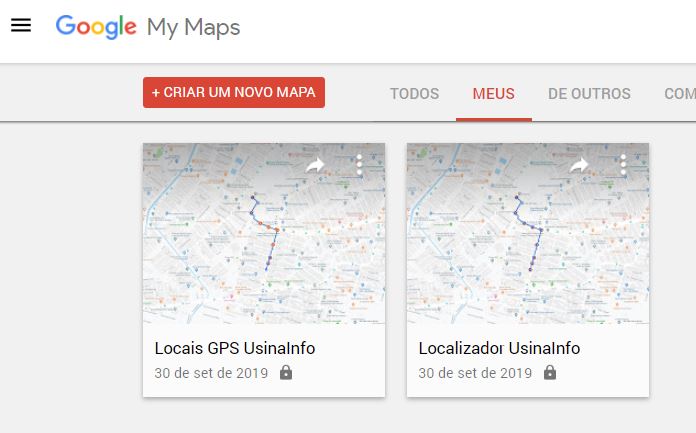
Figura 6 – Tela de criação de Mapa no Google My Maps.
Logo após, clique na opção Importar e selecione o arquivo do Excel com as coordenadas salvas.
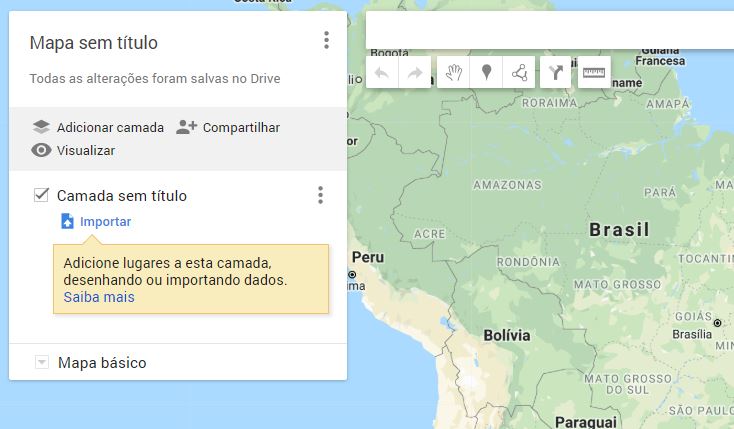
Figura 7 – Tela para importar as coordenadas no Google My Maps.
Em seguida, selecione todas as coordenadas e clique no botão para criação de rotas, conforme sinalizado pelo quadrado vermelho na Figura 8.
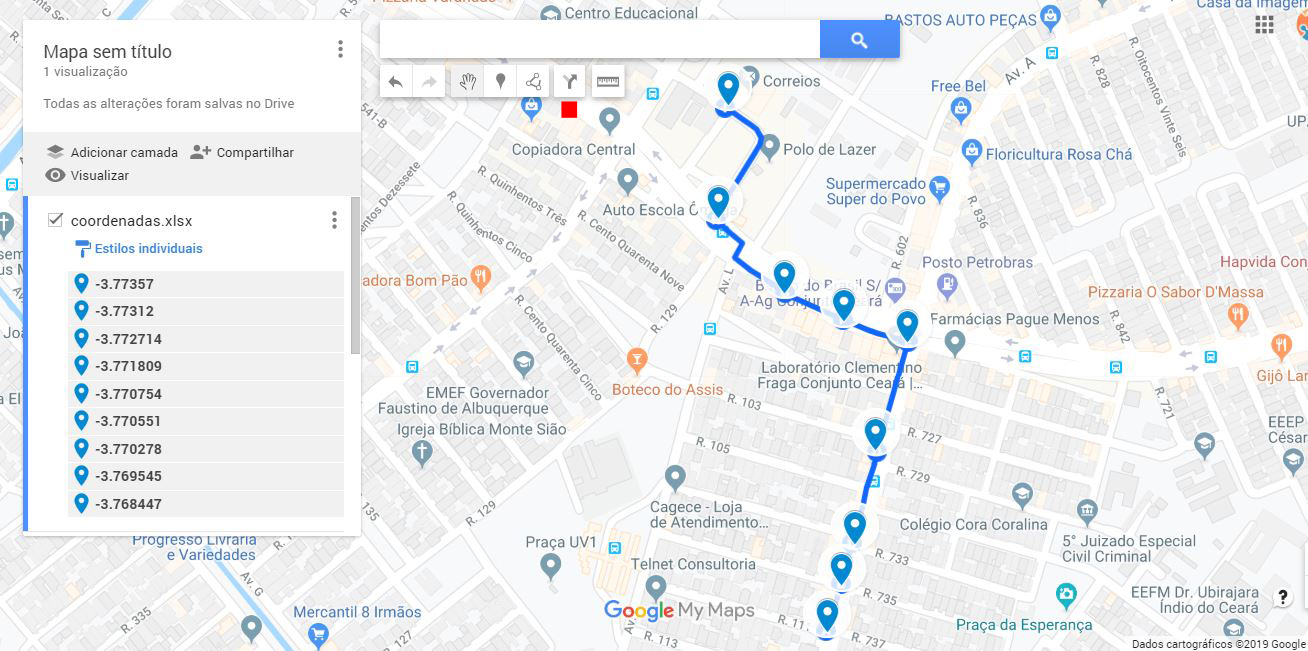
Figura 8 – Impressão de Pontos no Google My Maps.
Desse modo, será criada uma rota através dos pontos selecionados. Portanto, a partir do mapa poderemos avaliar todo o percurso realizado pelo objeto.
Conclusão do Datalogger de Percurso
O Projeto Arduino GPS 6M apresentado permite-nos avaliar o percurso de qualquer objeto de interesse que esteja em movimento. Através desse sistema, podemos aplicá-los na área de segurança e determinar com precisão, os locais que um veículo se movimentou em um intervalo de tempo.
Além de fornecer as coordenadas, o datalogger de percurso poderá oferecer diversas grandezas. Entre elas, destacamos a velocidade. Através dela, você poderá implementar uma nova funcionalidade e monitorar a velocidade do dispositivo em cada ponto do mapa.
Portanto, desafiamos você a criar esta nova funcionalidade. Em caso de dúvidas, escreva nos comentários.
Conheça toda Linha Arduino no Site da UsinaInfo.